 发布时间:2022年05月05日 15:20
发布时间:2022年05月05日 15:20 点击:
点击:一、一种无人机飞行控制系统的故障可检测度分析方法
无人机在飞行过程中易受复杂环境因素的影响,不可避免会发生故障,故障会导致飞行控制系统无法正常运行,甚至造成飞机坠毁事故,因此对无人机飞行控制系统进行故障检测具有重要意义。同时,由于无人机飞行控制系统的复杂度和规模不断上升,系统又受质量、体积和安装条件等客观因素的约束,难以保证故障可检测度的要求。由于在满足一定故障可检测度的条件下,故障诊断算法的设计才有实际意义,因此对无人机故障可检测度的研究至关重要。
本发明将故障可检测度量化分析问题转化为故障对应扩展状态分量的可观测度量化分析问题,利用基于奇异值分解的状态可观测度分析方法实现故障可检测度的量化评价。
专利优势:
(1)本发明将故障及其导数作为扩展状态,建立无人机飞行控制系统的扩维分段线性定常系统,将故障可检测度量化分析问题转化为扩展状态分量可观测度量化分析问题,利用基于奇异值分解的状态可观测度定量评价方法量化评价故障可检测度,能够量化评价无人机在不同飞行状态下作动器故障和传感器故障的故障可检测度。
(2)本发明从故障估计角度量化分析故障可检测度,提出无人机闭环非线性飞行控制系统的故障可检测度量化分析方法,其量化分析结果为无人机飞行控制系统传感器优化配置和故障检测算法设计提供一种参考依据。
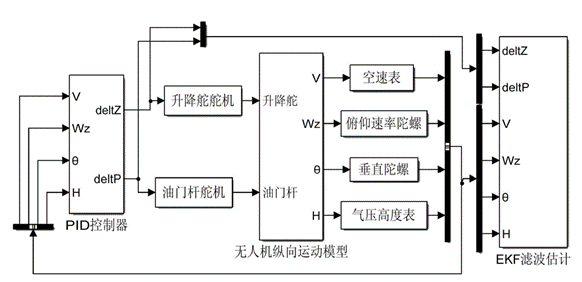
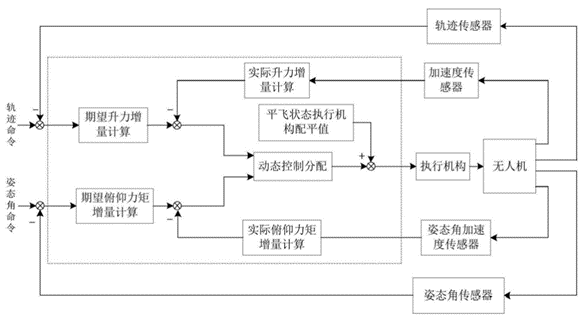
二、多操纵面无人机直接升力控制方法
主动控制技术包括多项内容,其中直接力控制便是一种可实现的主动控制功能,是常规飞行控制的发展。目前的直接升力控制方法多采用经典控制理论针对各个操纵面分别进行设计,使每个操纵面达到特定的控制目的。方法可以实现直接升力控制,但是各个操纵面功能单一,缺乏彼此间的协调,因此,并未充分发挥无人机多个操纵面的优势。
多个操纵面在提高系统控制性能的同时也带来了如何将控制指令分配到各个操纵面的问题。目前见诸文献的控制分配方法有:广义逆方法、直接分配方法、链式递增方法、线性规划法、二次规划法、闭环控制分配方法等。这些控制分配方法只能对期望的力矩指令进行分配,无法对期望的力指令进行分配,因此只能实现无人机的姿态控制,而无法实现姿态与轨迹解耦的直接升力控制。
本发明提出一种多操纵面无人机直接升力控制方法,实现多操纵面无人机姿态与轨迹解耦的直接升力控制。
专利优势:
(1)本发明方法根据期望的纵向轨迹命令和俯仰角命令,以及测量到的高度、速度、加速度、俯仰角、俯仰角加速度等飞行状态信息,计算期望升力增量与实际升力增量的误差,以及期望俯仰力矩增量与实际俯仰力矩增量的误差,采用动态控制分配方法实时地对升力增量误差和俯仰力矩增量误差进行控制分配计算,得到各个操纵面的偏转角度。
(2)本发明方法通过闭环力和力矩控制分配实现多操纵面无人机的直接升力控制,取得了较好的姿态与轨迹解耦控制效果,并且计算简单、实现方便。本发明方法可应用于具有冗余多操纵面无人机的直接升力飞行控制,实现无人机俯仰角姿态与高度轨迹的解耦控制。
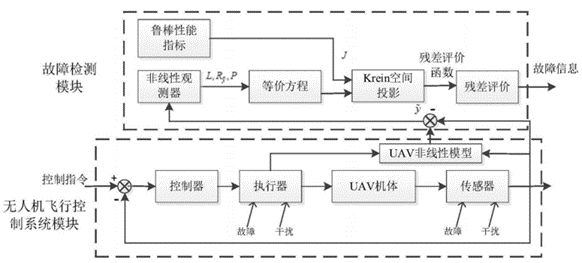
三、一种无人机飞行控制系统的故障检测方法
近年来,作为解析冗余的一个重要分支,基于模型的故障检测方法被广泛应用于无人机飞行控制系统的故障检测之中,并取得了丰硕成果。基于模型的故障检测方法可分三种:状态估计法、参数估计法和等价空间法。
但是,目前基于等价空间的无人机飞行控制系统故障检测研究成果仅限于线性模型,对于未知扰动存在下的非线性系统,特别是如何利用等价空间方法的优势,以及如何减小故障检测计算量以提高故障检测实时性和如何减小外界环境噪声对故障检测的影响以提高故障检测鲁棒性等问题,尚无相关专利提出,故该方向有待深入的研究。
本发明的方法能够实现无人机飞行控制系统执行器和传感器故障的在线检测。
专利优势:
(1)本发明采用基于模型的等价空间方法实现无人机飞行控制系统的故障检测。等价空间比较适合于拥有较多冗余测量信息的系统的故障诊断,因此比较适用于无人机系统;且相比于其它故障检测方法,等价空间方法能够实现残差与初始状态的解耦,从而提高故障检测精度。
(2)本发明针对传统等价空间方法在未知非白噪声干扰下鲁棒性较差问题,设计了鲁棒性性能指标,并利用矩阵的奇异值分解提高了无人机故障检测的鲁棒性。
(3)本发明将无人机连续非线性故障模型转化为离散时变故障模型,针对传统等价空间方法计算量较大的问题,将残差评价函数的计算转化为Krein空间中不定二次型的最小化问题,进而基于扩展卡尔曼滤波方程实现残差评价函数的递推计算,减小了故障检测计算量,有利于在线实时故障检测。
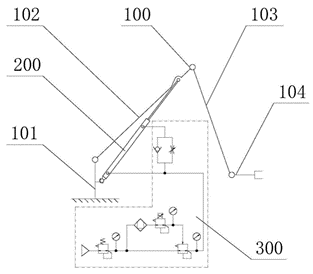
四、机械手大臂支撑力可调平衡装置及其参数优化设计方法
目前的抓取式机械手手臂主要由大臂、小臂、基座及手部等部件组成,各个关节均有电机驱动。机械手的重容比(机械手重量与负载重量之比)通常在10左右。
抓取式机械手手臂工作中,其大臂常常有空载或负载不同工况。当机械手大臂进行俯仰运动时,必然存在要克服机械手手臂及负载的重力矩问题。为了达到降低重容比的目的,有的采用了平衡装置,以满足机械手大臂在大负载情况下重力矩变化的需要。如何使气动平衡装置在机械手大臂的负载工况变化时,能更有针对性地提供不同工况时所需要的平衡力矩,以大大降低驱动装置的输出力矩的需要、扩展机械手的负载范围、大大降低机械手的重容比、提高机械手应用的经济性和适应性,仍需解决。
专利优势:
对机械手大臂采用了一种支撑力可调的气动平衡装置及其优化设计方法,可在机械手空载及不同负载工况时,有针对性地对其工作范围内手臂的重力矩及负载重力矩进行有效平衡,使得大臂可用较小的驱动力矩实现对较大负载的顺利搬运,该装置具有结构空间紧凑、重力矩平衡效果好、所需驱动力矩小、允许负载变化范围大、耗能低、大大降低机械手的重容比等优点。
联系方式:蒋学凯17660458662
电子邮箱:jszy@sdust.edu.cn
 科技园区
科技园区 学校首页
学校首页 今天是:
今天是: 其他
其他
 当前位置:
当前位置:
 友情链接:
友情链接: